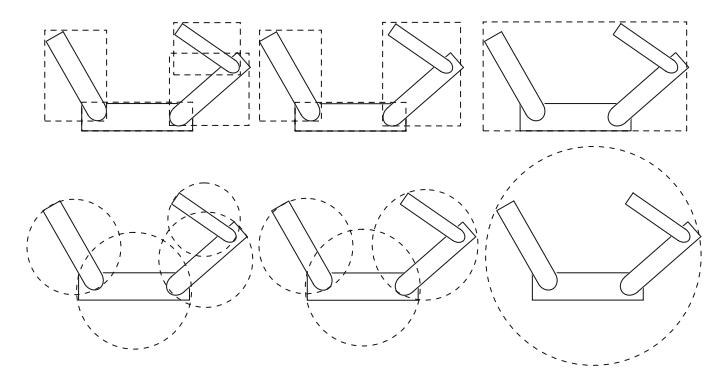
通过计算模型顶点的中心点并找出点与中心的最大距离,可以很容易地得到一个包围一组顶点的球体。如果点的分布不均匀或者集中在网格的一端,这样的计算会导致边界体积大于所需。 通过AABB计算球体通常能更好地接近网格顶点占用的体积。然而,该方法也不能给出具有最小体积的最佳球体。
要求取最小圆或球的问题,可以运用到的算法是Welzl algorithm,关于它算法的详细信息可参考下面链接:
Sunshine's Homepage - Welzl's Algorithm
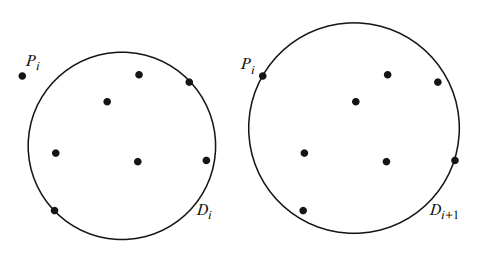
Welzl算法是一种增量方法,用于计算给定n个顶点 Sn= {P0, P1, ... , Pn-1} 的最佳包围球。 该算法基于这样一个原则:如果点集 Si={P0, P1, ... , Pi-1} 的最小包围球为Di,那么Di需要包含位于球体Di之外的另一个点Pi,则新的最小边界球Di+1必须在其球面上包含Pi点。下图是一张二维示意图:
根据这个原则,我们可以先简单以最小圆分析,可以取三个点建立一个圆,这三点有共线与不共线的情况,共线可取距离最远的两个点为直径建立圆,不共线则三个点即可确立外接圆。接着遍历所有点,对于给定遍历到的点p:
- 如果点p在圆内,则最小覆盖圆不做改变。
- 如果p点在圆外,根据上述原则,该点必须在要求取的最小覆盖圆上,又因为3点才能确立外接圆,所以需要枚举p之前的点来确立剩下的两个点。直到找到另外两个点,使得与p点确立的圆能将所有点包含在里面。
下述伪代码给出了Welzl算法作为递归函数的实现。可以通过 minSphere(S, n, B, 0)方式调用;其中变量S代表集合Sn,n为点集的数量,B是球面上的点集,初始值为空数组,nb为球面上点集数量。如公式所示,最小球体Dk是以k-1范围点的最小球体Dk-1来定义的,k的初始值为n。
Sphere minSphere(Point pt[], int np, Points bnd[], int nb) {
if(np == 1) {
if(nb == 0) return Sphere1pt(pt[0]);
if(nb == 1) return Sphere2pts(pt[0], bnd[0]);
} else if(np == 0) {
if(nb == 1) return Sphere1pt(bnd[0]);
if(nb == 2) return Sphere2pts(bnd[0], bnd[1]);
}
if(nb == 3) {
return Sphere3pts(bnd[0], bnd[1], bnd[2]);
}
Sphere D = minSphere(pt, np-1, bnd, nb);
if(D.isInside(pt[np-1])) {
return D;
}
bnd[nb] = pt[np-1];
nb++;
D = minSphere(pt, np-1, bnd, nb);
return D;
}

isInside函数定义了点是否在球体内部的判断方法,可以通过判断对应点与当前球心的距离,如果大于半径则点在球外。
其中Dmin(Sk-1, Pk-1)是包含Sk-1点集的最小包围球,并且点Pk-1在球面上。在运算的任何阶段,最小球体由集合(c,r)表示,其中c是球体中心,r是半径。上述伪代码中球体由函数Sphere1pt()、Sphere2pts()等定义,逻辑如下:
Sphere1pt(P): 中心点c=P,半径r=0;
Sphere2pts(P, Q): 中心点c = (P+Q)/2,半径r=|c-P|;
Sphere3pts(P, Q R)相对复杂,下面展开分析。
如上所述,通过两点确定的球体,是两点位于直径两端的最小包围球。在球体上径向相对的对称点称为对跖点。对于三个点 P、Q、R,球体将通过这些点作外接球。在这种情况下,球体的中心和半径与通过这些点的圆的中心和半径相同。构成三角形 PQR 的顶点 R 处的内角通过下式计算:

其中 a = P - R,并且 b = Q - R。
根据正弦定理:

通过这三个点得到的圆(以及球体)半径为:

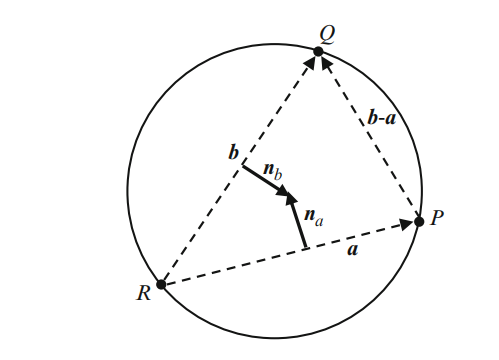
通过三个点的最小球体
上图中通过a与b的垂直平分线的交点可确立外接圆的圆心,其中a与b的垂直平分线可通过下述方式求取:

中心点的坐标可利用上述结果求取:

其中s代表点R坐标。
