本教程将教你如何掌握3D逆向运动学:这项技术解决了如何移动机械臂以达到特定目标的问题。
你可以在这里阅读本在线课程的其余部分:
引言
逆向运动学不仅是在电子游戏中会反复出现,在工程和科学领域也同样普遍。从机械臂的设计到对人类大脑对运动控制的理解,逆向运动学——无论以何种形式都扮演着重要的角色。
本系列的机械臂适用于前后两臂相连的情况,通过简单的三角函数相关算法实现更高的性能(后面将讨论适用于更多关节的机械臂实现,但是性能相比会较低)。
向三维空间扩展
如果你之前关注过《2D逆向运动学》系列,那么前面的内容对你来说应该并不陌生。如果你没有看过,建议回头看看。
之前我们做了个简化的2D机械臂案例,它可以作为解决3D逆向运动学的起点。
首先,我们需要理解,2D中的双关节机械臂具有两个自由度(2DOF)。与人们的想象相反,这并不意味着我们有两段机械臂;而是我们能够控制两个变量(即关节角度)。
当我们将这个问题扩展到三维空间时,我们的机械臂仍然有两段和两个关节。然而,如果我们假设我们还可以围绕第一个关节自由旋转机械臂,那么问题现在具有三个自由度(3DOF)。
在这种新场景下,第二个关节(B)保持不变。然而,我们假设第一个关节(A)现在可以在另一个维度上自由旋转。因此,第一个关节通常被称为“髋关节”,第二个关节被称为“膝关节”。你的膝关节通常只有一个自由度(前后),而髋关节有两个自由度(前后和内外)。髋关节旋转的角度用θ表示。
我们可以想象一个机械臂,其中两个关节都有两个自由度,总共四个自由度。但问题在于,这将导致存在多个解,使我们的方法不再有效。但是“腿式”机械臂(即具有髋关节和膝关节的机械臂)在游戏和工业中都非常常见。所以这种方法很值得研究。
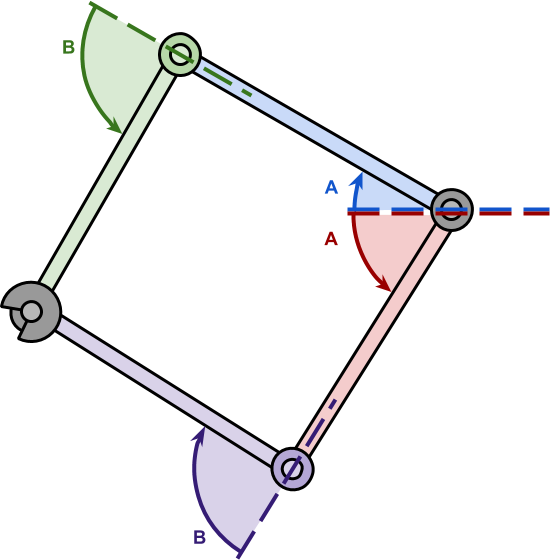
如果你读过之前的文章,你可能会记得,如果目标在2D中是可“触及”的,那么总是存在两个“镜像”解(如下所示)。
从2D到3D
到目前为止,我们只知道如何解决运动区域被限制在XY平面内的逆向运动学问题。从2D到3D的维度扩展也需要使用2D的解决方案。下方的动画展示了一个机械臂在3D空间中试图到达一个围绕Y轴旋转的点。很明显,机械臂唯一做的也是旋转;它的角度A和B没有变化,只有θ在变化。

这意味着,如果我们知道在XY平面上执行逆向运动学(前面已经讲过),那么我们就可以通过两次简单的旋转在整个XYZ空间中执行。从概念上讲,我们可以通过三个步骤来解决这个问题:
- 将目标点围绕Y轴旋转,直到它位于XY平面上。
- 移动机械臂,使其能够像在2D中一样到达目标点。
- 通过围绕Y轴反向旋转整个机械臂来“撤销”之前的旋转。
我们可以通过更高效的方式实现这一点,即不在XY平面上执行2D逆向运动学,而是在从机械臂根部到目标点的垂直平面上执行。
围绕Y轴旋转
要在3D中运用逆向运动学,我们首先需要计算θ,这是整个机械臂旋转的角度。这是添加到髋关节的额外自由度。

找到θ的最佳方法是假设机械臂已经到达目标位置(即C已经位于目标点),然后计算得到的角度θ。由于θ是髋关节围绕Y轴旋转的角度,我们可以直接从顶部观察机械臂。在XZ平面的俯视图中(如下所示),机械臂看起来像一条直线。这是因为,除了髋关节外,其他两个关节都被限制在一个平面上。
如果我们将线段AC视为一个直角三角形的斜边,我们可以使用一些三角函数来计算角度θ:
$$
θ=tan^{-1}({Δz \over Δx})=tan^{-1}({Cz-Az \over Cx-Ax})
$$
在WY平面上进行逆向运动学
从技术上讲,知道θ已经足以解决3D逆向运动学问题。事实上,我们可以按照上面提出的算法:将目标点围绕Y轴旋转-θ角度,在XY平面上执行逆向运动学,最后将整个机械臂旋转+θ角度。
更快的版本是,不在2D平面上执行逆向运动学,而是直接在通过髋关节和目标点的垂直平面上执行。然而,不幸的是,有一些因素阻止我们这样做。让我们再次查看标有所有角度的示意图:
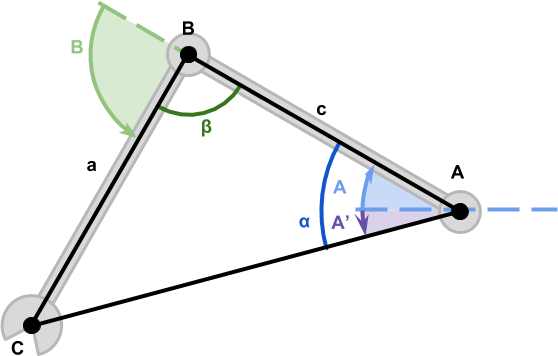
为了计算控制第一个关节的角度A,我们需要计算A'。这是第一个关节与目标点之间的角度。如果我们回顾用于计算A'的方程,我们会注意到一个大问题:它假设所有点都位于XY平面上:
 在我们的3D场景中,机械臂是会围绕Y轴旋转θ角度的。然而,如果我们连同机械臂一起旋转对应角度,新的示意图可以基本维持不变。我们将这个新的参考系称为WY,因为X轴现在被W轴取代,W轴是未围绕Y轴旋转θ角的X轴。
在我们的3D场景中,机械臂是会围绕Y轴旋转θ角度的。然而,如果我们连同机械臂一起旋转对应角度,新的示意图可以基本维持不变。我们将这个新的参考系称为WY,因为X轴现在被W轴取代,W轴是未围绕Y轴旋转θ角的X轴。

我们不能像计算Δy那样简单地使用Dx - Ax。这是因为虽然C和D在Y轴上对齐,但A和D并不与X轴对齐。它们与W轴对齐。因此,计算Δw的最佳方法是获取A到D的距离。这会丢失Δw的符号,但幸运的是,这对我们的计算没有实际影响。如果你的机械臂向相反方向移动,只需在代码中翻转Δw的符号即可。

其中$\left|\overline{A D}\right|$是从A到D的线段长度。可以通过诸如 Vector3.Distance的函数轻松计算,或者你也可以直接使用勾股定理:
 在上面的方程中,勾股定理中的Y分量被抵消了,因为点D的Y分量与A相同,所以它们的Δy为零。
在上面的方程中,勾股定理中的Y分量被抵消了,因为点D的Y分量与A相同,所以它们的Δy为零。

现在,我们确实拥有了所有必要的工具,来为具有一个膝关节和髋关节的机械臂在3D中执行逆向运动学:

